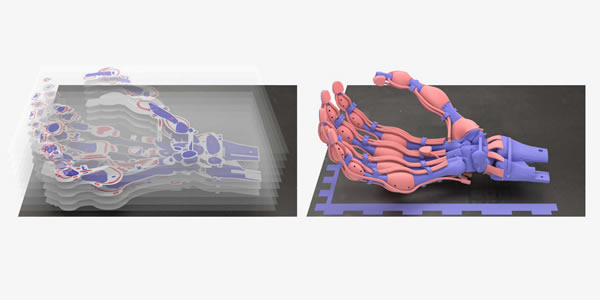
Gracias a un avance en la tecnología de impresión que posibilita la combinación de materiales flexibles, elásticos y rígidos, se logró imprimir una mano robótica altamente funcional que incorpora no solo huesos, sino también ligamentos y tendones.
Mediante la aplicación de la tecnología de impresión 3D, se ha conseguido desarrollar la primera mano robótica de consistencia suave, la cual incluye elementos anatómicos como huesos, ligamentos y tendones.
Esta innovación, destacada en la revista Nature, es el resultado de una colaboración entre la Universidad Politécnica de Zúrich (ETH) y Inkbit, una empresa pionera en impresión 3D fundada por investigadores del Instituto de Tecnología de Massachusetts (MIT).
Mano robótica se logró gracias a nueva tecnología en impresoras
Hasta ahora, la impresión 3D se restringía principalmente a plásticos de curado rápido, conocidos como polímeros, que poseen una gran rigidez. Sin embargo, los científicos han conseguido una notable evolución tecnológica al adaptar estas impresoras para utilizar plásticos de curado lento, caracterizados por su mayor elasticidad, durabilidad y robustez.
Gracias a esta adaptación tecnológica, los investigadores ahora tienen la capacidad de imprimir en 3D robots complejos y considerablemente más resistentes, utilizando una variedad de materiales de alta calidad en un solo proceso.
Ahora es posible combinar materiales de consistencia blanda, elástica y rígida para fabricar con precisión estructuras delicadas y piezas con diversas cavidades según la necesidad. Este avance abre un vasto abanico de oportunidades para el avance de la robótica blanda.
Un ejemplo destacado de esta aplicación es la creación de la mano mencionada, la cual incorpora huesos, ligamentos y tendones fabricados simultáneamente a partir de diversos polímeros.
Thomas Buchner, profesor de robótica de la ETH Zúrich, comentó que “con los polímeros de curado rápido que hemos estado utilizando en impresión 3D hasta ahora no habríamos podido hacer esta mano, pero gracias al uso de polímeros de curado lento, que tienen estupendas propiedades elásticas y vuelven a su estado original mucho más rápido después de doblarse que los otros, lo hemos hecho posible”.
Universidad Politécnica de Zurich (ETH)
Ventajas de los robots blandos
Asimismo, el investigador precisó que “los robots hechos de materiales elásticos, como la mano desarrollada, tienen múltiples ventajas sobre los robots convencionales hechos de metal, desde que haya menos riesgo de lesiones cuando trabajan con humanos hasta ser más adecuados para manipular mercancías frágiles”.
Con el objetivo de incorporar polímeros de curado lento, los científicos perfeccionaron la tecnología de impresión 3D mediante la integración de un escáner láser 3D. Este dispositivo verifica instantáneamente cada capa impresa para identificar posibles irregularidades en la superficie.
En lugar de corregir las capas con imperfecciones, esta novedosa tecnología toma en consideración dichas irregularidades al imprimir la siguiente capa.
Otro de los colaboradores, Wojciech Matusik, quien es profesor de Ingeniería Eléctrica e Informática en el MIT, explicó que un sistema de retroalimentación contrarresta estas imperfecciones al imprimir la siguiente capa. Este mecanismo realiza ajustes precisos en la cantidad de material a imprimir en tiempo real, con una precisión milimétrica.
Según un comunicado de la ETH de Zúrich, planean emplear esta tecnología para concebir estructuras aún más avanzadas y explorar aplicaciones adicionales. Paralelamente, Inkbit se encargará de incorporarla en nuevas impresoras 3D para su comercialización.